
Researchers at the Massachusetts Institute of Technology have developed a new fabrication technique that enables the production of low-voltage, power-dense, high endurance soft actuators for aerial microrobots. The artificial muscles improve the robot’s payload and allow it to achieve best-in-class hovering performance.
Artificial Muscles With Fewer Defects
The soft actuators operate with 75 percent lower voltage than current versions and carry 80 percent more payload. The artificial muscles that are produced by the fabrication technique also have fewer defects, which extends the lifespan of the components.
Kevin Chen is the D. Reid Weedon, Jr. ‘41 assistant professor in the Department of Electrical Engineering and Computer Science. He is also the head of the Soft and Micro Robotics Laboratory in the Research Laboratory of Electronics (RLE) and senior author of the research.
“This opens up a lot of opportunities in the future for us to transition to putting power electronics on the microrobot. People tend to think that soft robots are not as capable as rigid robots. We demonstrate that this robot, weighing less than a gram, flies for the longest time with the smallest error during a hovering flight. The take-home message is that soft robots can exceed the performance of rigid robots,” says Chen.
The research was published in Advanced Materials.
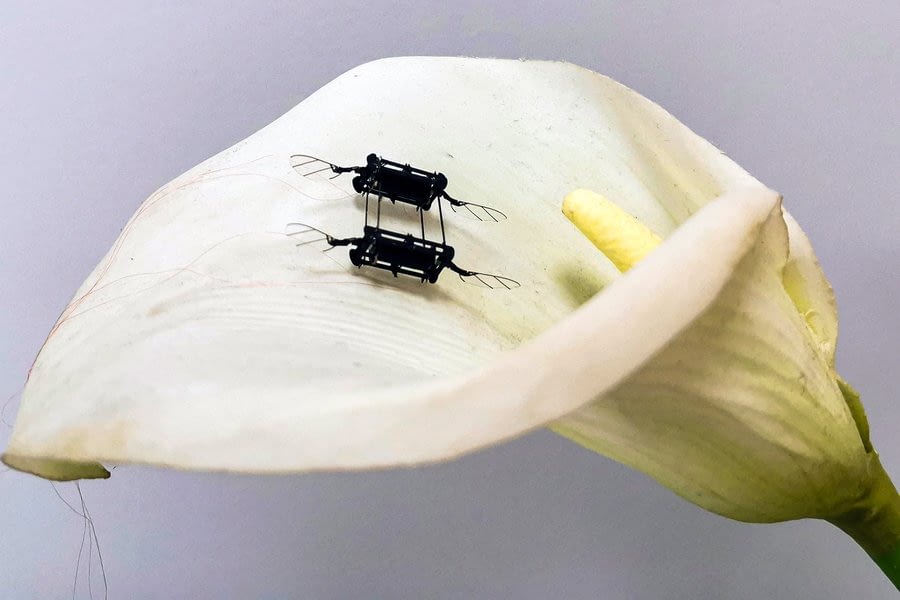
The rectangular robot weighs less than one-fourth of a penny, and it has four sets of wings that are each driven by a soft actuator. The muscle-like actuators consist of layers of elastomer that sit between two thin electrodes. When voltage is applied to the actuator, the electrodes squeeze the elastomer, resulting in a mechanical strain that flaps the wing.
The team was able to create an actuator with 20 layers, each measuring 10 micrometers in thickness.
Spin Coating Process
One of the major obstacles faced by the team came in the spin coating process, which involves an elastomer being poured onto a flat surface and rapidly rotated. The centrifugal force results in the film being pulled outward to become thinner.
“In this process, air comes back into the elastomer and creates a lot of microscopic air bubbles. The diameter of these air bubbles is barely 1 micrometer, so previously we just sort of ignored them. But when you get thinner and thinner layers, the effect of the air bubbles becomes stronger and stronger. That is traditionally why people haven’t been able to make these very thin layers,” Chen explains.
By performing a vacuuming process right after spin coating, the air bubbles are removed and the elastomer can be baked to dry.
By removing these defects, the power output of the actuator is increased by more than 300 percent, and its lifespan is significantly improved.
The researchers used these techniques to create the 20-layer artificial muscle, which was then tested against their previous sx-layer version and state-of-the-art, rigid actuators.
The 20-layer actuator, requiring less than 500 volts to operate, exerted enough power to give the robot a lift-to-weight ratio of 3.7 to 1, which means it could carry items about three times its weight.
The team also successfully carried out a 20-second hovering flight, which according to Chen, is the longest ever recorded by a subgram robot.
“Two years ago, we created the most power-dense actuator and it could barely fly. We started to wonder, can soft robots ever compete with rigid robots? We observed one defect after another, so we kept working and we solved one fabrication problem after another, and now the soft actuator’s performance is catching up. They are even a little bit better than the state-of-the-art rigid ones. And there are still a number of fabrication processes in material science that we don’t understand. So, I am very excited to continue to reduce actuation voltage,” he says.
The team is now looking towards methods that are more precise than spin coating in order to make the layers thinner. Chen hopes that the thickness can be reduced down to just 1 micrometer.
Credit: Source link



















{kind=link}