
Pittsburgh, PA –News Direct– Duality Robotics
-
DARPA’s RACER-Sim program leverages advanced simulation to accelerate development of autonomous off-road vehicles that strive to match soldier driving abilities
-
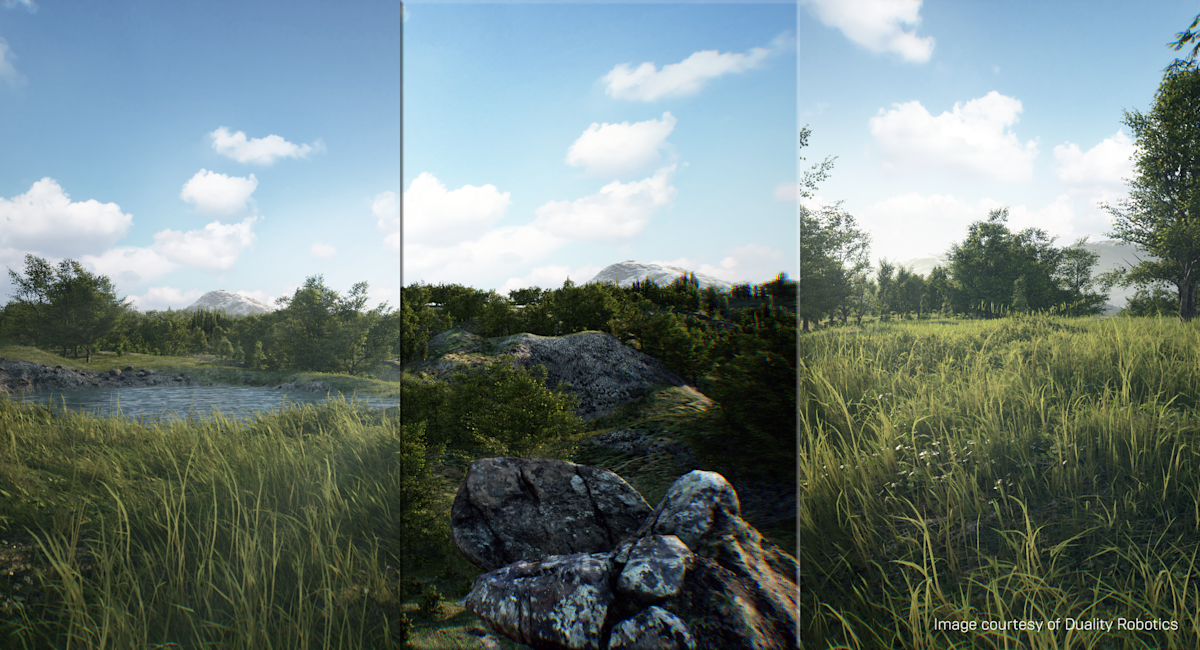
Duality to provide 20 km x 4 km photoreal and tunable virtual environment to simulate vehicle’s diverse operating conditions
-
Precise digital twin of the vehicle is capable of streaming high fidelity, real time synthetic data from virtual sensors
-
Duality and Neya Systems to close the loop between real and virtual worlds for virtualized validation in complex terrain
Duality Robotics has been selected as a provider of advanced environmental simulation technology to help bridge the gap from virtual to real-world environments as part of DARPA’s (Defense Advanced Research Projects Agency) RACER-Sim program.
Over the next four years, the goal of DARPA’s Robotic Autonomy in Complex Environments with Resiliency – Simulation (RACER-Sim) program is to ensure that algorithms can be developed, validated and deployed more efficiently to enable autonomous unmanned ground vehicles (UGVs) that meet or exceed soldier driving abilities in diverse terrains and operating conditions.

To help meet this goal, Duality Robotics will leverage its expertise in bridging the physical and virtual worlds, as well as its Falcon platform for advanced digital twin simulation. The Duality Robotics team is also tasked with building a 80 km2 realistic environment wherein autonomous vehicle systems can be designed and validated, ensuring their ability to maneuver off-road landscapes as precisely as humans.
To capture the natural variations of a physical environment, no two square meters of this environmentwill be identical. In addition, the environment can be tuned to increase or decrease vegetation cover, rock sizes and other operating conditions using Pixar’s open-source Universal Scene Description (USD) format — the interoperable 3D data model that forms the backbone of Duality’s platform. The other key building block of Duality’s platform is the Unreal Engine from Epic Games which functions as a 3D operating system for the Falcon simulator as well as an authoring ecosystem with readily available 3D assets and talent.
Duality has partnered with Neya Systems, a division of Applied Research Associates, to leverage Neya’s autonomy expertise to validate the developed technologies through testing, data collection, machine modeling, and integration with autonomy stacks. By connecting to the data streams from virtual sensors in Falcon, the autonomy algorithms will make complex driving decisions in real time and passback machine actuation commands to the digital twin of the UGV. This closed loop simulation will also allow RACER participants to more quickly understand the implications of algorithm and code changes in their autonomy software, run regressions to ensure system stability, and collect synthetic data to train their machine learning (ML) models.
“In partnership with DARPA and the other RACER program participants, Duality Robotics and NeyaSystems will help accelerate innovation in environmental simulation and autonomy software for mission critical UGV applications,” said Michael Taylor, Chief Product Officer, Duality Robotics. “Duality is building foundational infrastructure for improving automated unmanned vehicles’ safety, reliability and adaptability in and around complex operating environments.”
“With these tools and capabilities, Neya can quickly create a range of scenarios, validate new software builds and measure system performance parameters at a fraction of the cost,” said Mike Formica, Division Manager, Neya Systems.
About DARPA’s Robotic Autonomy in Complex Environments with Resiliency – Simulation(RACER-Sim) Program
The RACER-Sim program is seeking to develop technologies that bridge the gap from simulation to the real world and significantly reduce the cost of off-road autonomy development. While the past decade has seen increased use of simulation in developing field robotics, the military off-road environment is especially challenging and complex. Requirements include re-creating three-dimensional surfaces, compliant soils and vegetation, hundreds of obstacle classes, and unique platform-surface interactions. In addition, modeling the high speed off-road performance of sensors/modalities and their interaction with the environment remains a software and processing challenge. Over a four year timeline, RACER-Sim will develop technologies that are applicable to the off-road environment in the areas of algorithm development, simulation element technologies, and simulator content generation.
About Neya Systems
Neya Systems, a division of Applied Research Associates, is a leader in advanced off-road autonomy and high-level multi-robot mission planning. Neya provides innovative solutions to customers in the defense, mining, construction, and security industries. Neya’s full-stack autonomy includes capabilities in low-level control, perception, safeguarded teleoperation, full autonomy, and multi-agent missionplanning. To learn more, visit www.neyarobotics.com
About Duality Robotics
With over 50 patents across robotics, simulation and visualization, Duality’s multidisciplinary team is building the enterprise Metaverse for solving real world problems. Accurate digital twins of environments and operating systems result in high-fidelity data and predictive behavior modeling that enables Duality’s customers to deploy automated systems robustly and at scale. For more information, visit www.duality.ai.
Contact Details
Jenna Beaucage
press@duality.ai
Company Website
https://www.duality.ai
View source version on newsdirect.com: https://newsdirect.com/news/duality-robotics-awarded-darpa-project-for-photorealistic-environmental-simulation-and-sensing-for-autonomous-ugvs-815542913
Credit: Source link



















{kind=link}