
A researcher at the University of Notre Dame has developed multi-legged robots that can maneuver through difficult environments and complete complex tasks as a swarm.
The research was published in Science Robotics.
Yasemin Ozkan-Aydin is an assistant professor of electrical engineering at the university. She is the one responsible for creating the new robot.
“Legged robots can navigate challenging environments such as rough terrain and tight spaces, and the use of limbs offers effective body support, enables rapid maneuverability and facilitates obstacle crossing,” Ozkan-Aydin said. “However, legged robots face unique mobility challenges in terrestrial environments, which results in reduced locomotor performance.”
Enhancing Mobility
Ozkan-Aydin hypothesized that a physical connection between individual robots could enhance the mobility of a terrestrial legged collective system. By physically connecting individual robots to each other to form a multi-legged system, they can collectively overcome challenges better than a single individual robot completing small tasks.
“When ants collect or transport objects, if one comes upon an obstacle, the group works collectively to overcome that obstacle. If there’s a gap in the path, for example, they will form a bridge so the other ants can travel across — and that is the inspiration for this study,” she said. “Through robotics we’re able to gain a better understanding of the dynamics and collective behaviors of these biological systems and explore how we might be able to use this kind of technology in the future.”
Building the Robots
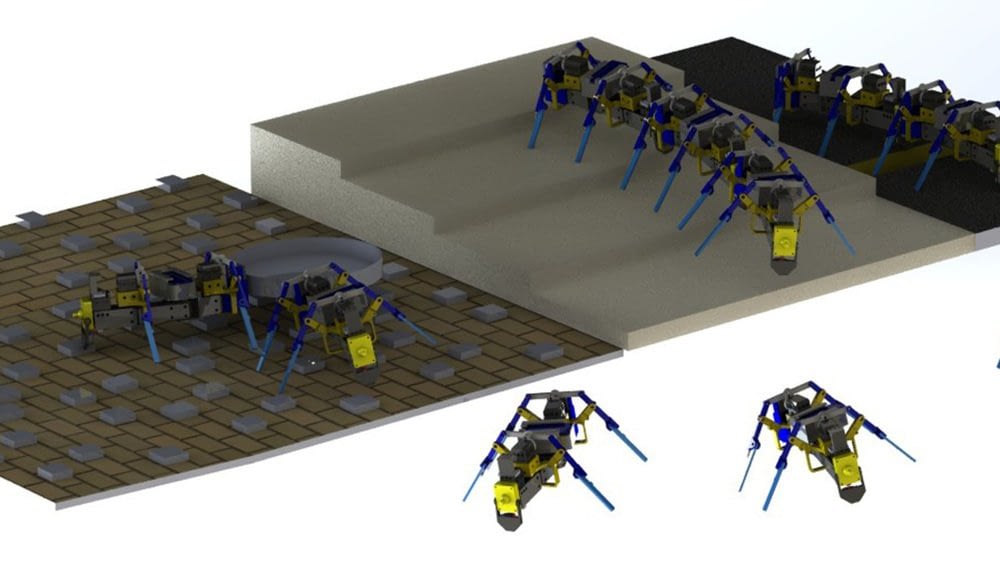
Ozkan-Aydin relied on a 3D printer to construct the four-legged robots, which measure 15 to 20 centimeters in length. Each one consists of a lithium polymer battery, microcontroller and three sensors. There is a light sensor at the front and two magnetic touch sensors at the front and back, which enables them to connect with each other.
With the addition of four flexible legs, the robots don’t need as many sensors and parts, and it helps them interact with rough or uneven terrain.
“You don’t need additional sensors to detect obstacles because the flexibility in the legs helps the robot to move right past them,” said Ozkan-Aydin. “They can test for gaps in a path, building a bridge with their bodies; move objects individually; or connect to move objects collectively in different types of environments, not dissimilar to ants.”
The robots were tested over a variety of surfaces, such as grass, mulch, leaves and acorns. Flat-ground experiments involved particle board and stairs with insulation foam, and other tests included shag carpeting and rectangular wooden blocks.
If an individual unit became stuck, it sent a signal to additional robots. These robots then linked together to support each other through obstacles while working collaboratively.
According to Ozkan-Aydin, the new research could help with the design of low-cost legged swarms that can adapt to unforeseen situations and carry out cooperative tasks like search-and-rescue missions, collective object transport, and space exploration. She will now focus on improving the control, sensing and power capabilities of the systems.
“For functional swarm systems, the battery technology needs to be improved,” she said. “We need small batteries that can provide more power, ideally lasting more than 10 hours. Otherwise, using this type of system in the real world isn’t sustainable.” Additional limitations include the need for more sensors and more powerful motors — while keeping the size of the robots small.
“You need to think about how the robots would function in the real world, so you need to think about how much power is required, the size of the battery you use. Everything is limited so you need to make decisions with every part of the machine.”
Credit: Source link




















{kind=link}