

Researchers at the Indian Institute of Technology Bhubaneswar, in collaboration with TCS Research and Wageningen University, recently devised a new strategy that could improve coordination among different robots tackling complex missions as a team. This strategy, introduced in a paper pre-published on arXiv, is based on a split-architecture that addresses communication and computations separately, while periodically coordinating the two to achieve optimal results.
The researchers’ paper was recently presented at the IEEE RoboCom 2022 conference, held in conjunction with IEEE CCNC 2022, a top tier conference in the field of networking and distributed computing. At IEEE RoboCom 2022, it received the Best Paper Award.
“Swarm-robotics is on the path to becoming a key tool for human civilization,” Dr. Sudipta Saha, the lead researcher of the team that carried out the study, told TechXplore. “For instance, in medical science, it will be necessary to use numerous nano-bots to boost immune-therapy, targeted and effective drug transfer, etc.; while in the army it will be necessary for exploring unknown terrains that are hard for humans to enter, enabling agile supervision of borders and similar activities. In construction, it can enable technologies such as large-scale 3D printing and in agriculture it can help to monitor crop health and intervene to improve yields.”
Regardless of the context in which they are implemented, to perform well multi-robot teams need to be based on efficient communication and coordination systems. Conventional communication systems, however, force robots or devices to compete for a chance to share information with other systems. This process can waste significant time and result in high power consumption.
“For activities such as large-scale 3D printing, agriculture monitoring, etc., such losses are tolerable, but for time critical jobs such as nano-robotic drug delivery, firefighting or military activities, it would be too costly to compromise on the communication layer’s sub-optimal performance,” Dr. Saha said. “It’s always desirable to have a solution that enables swarms of robots to also carry out time-critical and serious jobs where precision cannot be sacrificed, due to unnecessary packet collisions and energy misuse.”
To overcome the limitations of existing communication systems, Dr. Saha and his team created an entirely new paradigm that is based on an approach called ‘concurrent transmission’. Instead of putting devices or robots in competition, this approach allows them to cooperate to achieve a common goal.
“Applying concurrent transmission to a generic multi-robot platform is not a straightforward task,” Dr. Saha said. “In the Decentralized and Smart Systems Research Group (DSSRG) we are working on various aspects of concurrent-transmission based communication and its application in various contexts. Our expertise in this field helped us to come up with a novel split-architecture based solution for easy and fruitful use of concurrent-transmission for heterogeneous multi-robot systems.”
Concurrent transmission techniques have several advantages over conventional communication strategies. Most notably, they allow devices to share data with each other more rapidly and efficiently.
Despite its advantageous characteristics, concurrent transmission can be difficult to implement using generic hardware. So far, it thus primarily achieved good results when it was applied on specific and sophisticated hardware.
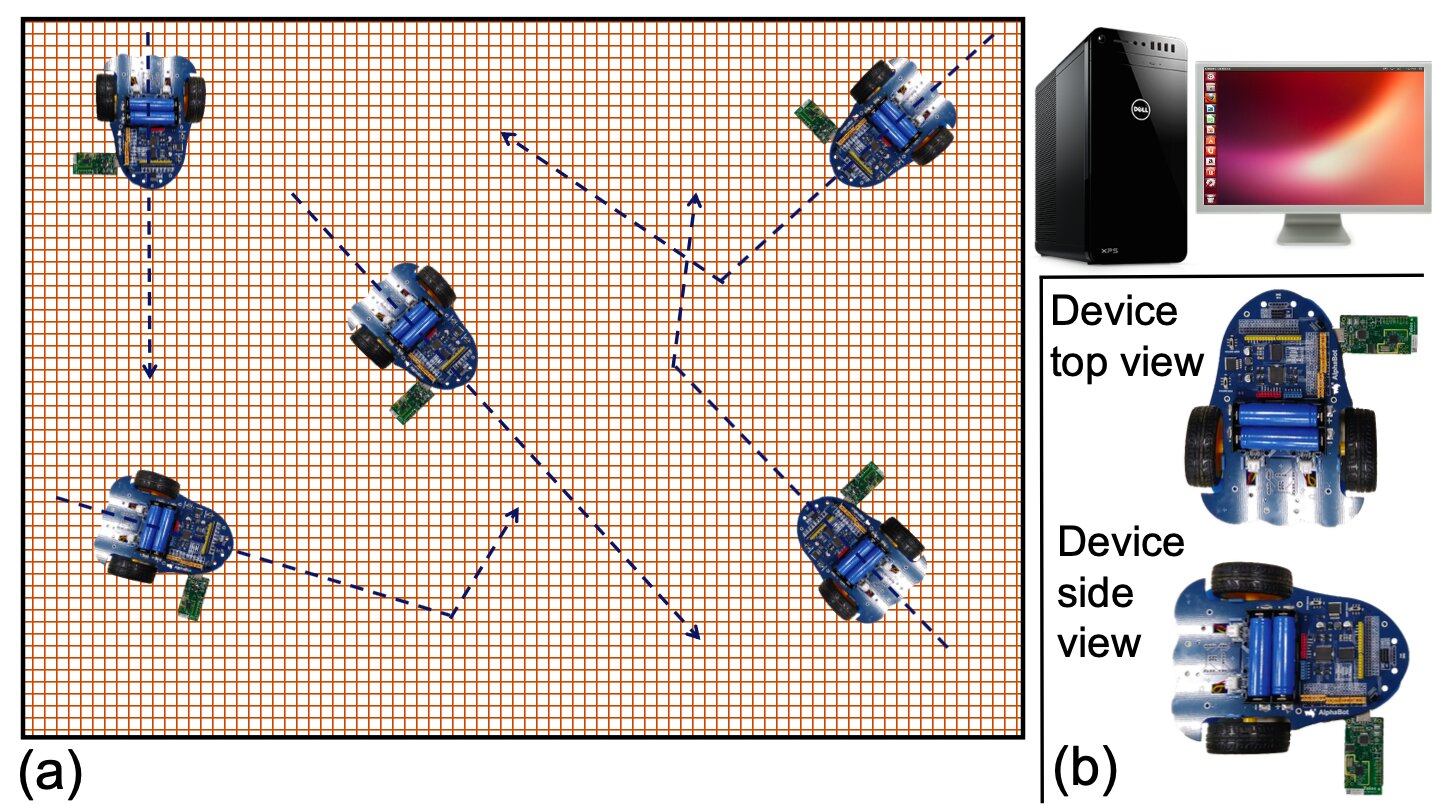
“Swarm robotics and multi-robot systems also have their own requirements, including control-system, AI/ML and other computation intensive tasks,” Dr. Saha said. “To bridge concurrent transmission with multi-robot systems, we proposed a split architecture where the communication and computations are done in two different hardware units that communicate with each other through a loosely coupled serial line communication. This way, we manage to get the benefit of both the domains at the same time.”

It is not uncommon for roboticists to combine different types of hardware units into one, as Dr. Saha and his team did in their recent study. By coherently merging two distinct hardware systems into a collective architecture, they were able to attain very promising results, enhancing cooperation and communications among multiple robots.
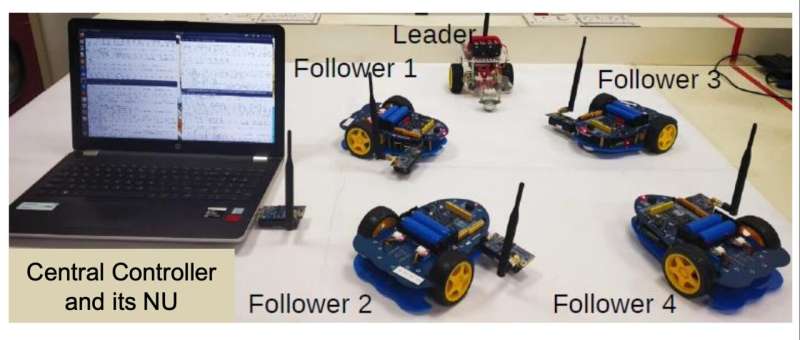
The team specifically tested their communication system on a group of five two-wheeled robots. In their evaluations, they found that their system allowed the robots to efficiently coordinate with each other when forming different formations, while also moving dynamically and at similar speeds.
“One of the key achievements of our work is a seamless millisecond level time-synchronization among heterogeneous hardware units, in a purely decentralized manner and without exploiting any internet-connectivity or GPS,” Dr. Saha said. “Also, in this initial work, the use of a concurrent-transmission based communication framework with our split architecture-based strategy enabled us to achieve centimeter level precision among the robots, which indicates its value for executing time-critical and delicate missions using swarms of robots.”
In the future, the new concurrent transmission-based strategy created by this team of researchers could help to enhance cooperation between multiple robots in a flock during complex or time-sensitive missions. This includes, for instance, search and rescue efforts, military operations and surgical procedures.
“After our initial success, we are now going to carry out more rigorous and thorough studies especially on the interaction between the control-system aspects and the concurrent-transmission based communication mechanism,” Dr. Saha added. “We also plan to apply the mechanism to a large swarm of drones and ground vehicles and assess its capabilities.”
Creating the human-robotic dream team
Concurrent transmission for multi-robot coordination. arXiv:2112.00273 [cs.RO]. arxiv.org/abs/2112.00273
© 2022 Science X Network
Citation:
A concurrent transmission strategy to enhance multi-robot cooperation (2022, January 10)
retrieved 10 January 2022
from https://techxplore.com/news/2022-01-concurrent-transmission-strategy-multi-robot-cooperation.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.
Credit: Source link


















{kind=link}