
A collaborative team of researchers from Cornell and the U.S. Army Research Laboratory has used hydrodynamic and magnetic forces to drive a rubbery and deformable pump that provides soft robots with a circulatory system. This system mimics the biology of animals in nature.
The paper titled “Magnetohydrodynamic Levitation for High-Performance Flexible Pumps” was published in Proceedings of the National Academy of Sciences.
Likelike Machines
Rob Shepherd is associate professor of mechanical and aerospace engineering in the College of Engineering. He led the team of researchers at Cornell alongside lead author Yoav Matia.
“These distributed soft pumps operate much more like human hearts and the arteries from which the blood is delivered,” said Shepherd. “We’ve had robot blood that we published from our group, and now we have robot hearts. The combination of the two will make more lifelike machines.”
The Organic Robotics Lab led by Shepherd previously used soft material composites to design a wide range of technologies, such as a stretchable sensor “skin” and combustion-driven braille displays and clothing that monitors athletic performance. They also developed soft robots that can walk, crawl, swim, and sweat. According to the team, many of these creations could be applied in the fields of patient care and rehabilitation.
Creating the Circulatory System
Soft robots require a circulatory system to store energy and power their appendages and movements, which allow them to complete complex tasks.
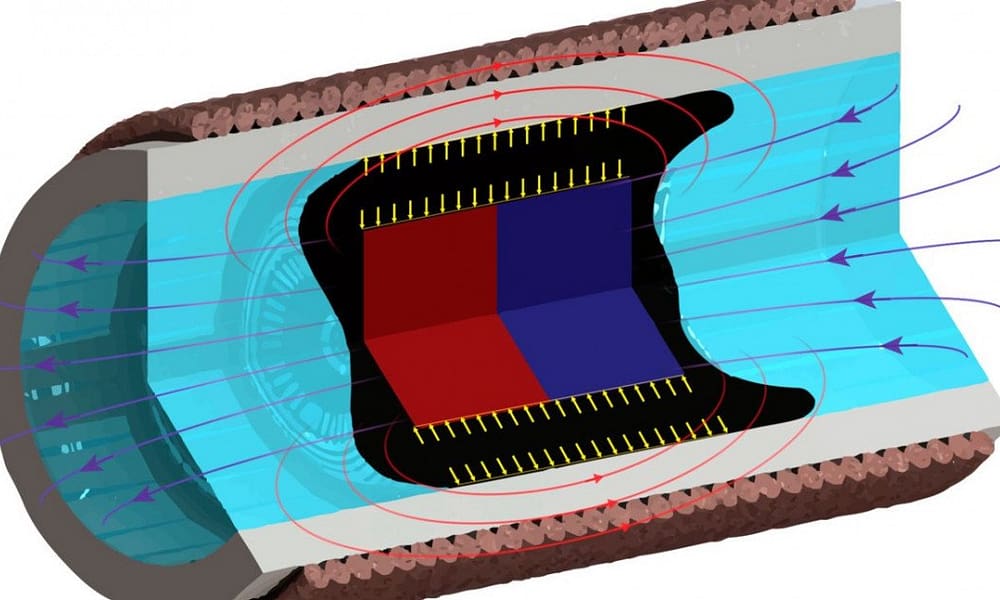
The newly developed elastomeric pump consists of a soft silicone tube fitted with coils of wire called solenoids. These solenoids are spaced around the elastomeric pump’s exterior, and gaps between the coils allow the tube to bend and stretch. Within the tube is a solid core magnet surrounded by magnetorheological fluid, which stiffens when exposed to a magnetic field. This keeps the core centered and creates a seal at the same time. By applying the magnetic field in different ways, the core magnet can be moved back and forth to push fluids like water and low-viscosity oils forward with continuous force.
Shepherd served as co-senior author of the research with Nathan Lazarus of the U.S. Army Research Laboratory.
“We’re operating at pressures and flow rates that are 100 times what has been done in other soft pumps,” said Shepherd. “Compared to hard pumps, we’re still about 10 times lower in performance. So that means we can’t push really viscous oils at very high flow rates.”
The researchers carried out an experiment to demonstrate that the pump system can maintain a continuous performance under large deformations. They also tracked the performance parameters to ensure future iterations can be custom-tailored depending on the robot.
“We thought it was important to have scaling relationships for all the different parameters of the pump, so that when we design something new, with different tube diameters and different lengths, we would know how we should tune the pump for the performance we want,” Shepherd said.
Credit: Source link

















{kind=link}