


A member of one of the robotics teams holds a drone. (Jon Cherry/For The Washington Post)
One afternoon in late September, a yellow four-legged robot called Spot pranced and pirouetted on a replica of a dingy subway platform that had been constructed inside a vast limestone cavern burrowed beneath the Louisville Zoo.
Spot snooped around the platform, inhaling data through cameras and sensors arrayed on its vacuum-cleaner-size torso. The robot’s little feet kept darting perilously close to the edge of the platform, then back to safety. Finally, apparently satisfied by what it had learned, Spot nimbly descended a staircase to make further investigations on the track bed. Back on the now-deserted platform, a poster on the wall declared: “The Future Is Now.”
And what a future. In this scenario, meticulously constructed for the finale of the DARPA Subterranean Challenge — an elaborate three-year, $82 million Pentagon robotics competition — something bad has happened to humans underground, and the robots are coming to the rescue. Spot and its robo-teammates and competitors — dozens of walking, driving and flying robots — were on a scavenger hunt for “survivors” (mannequins giving off body heat and vocal sounds) and objects such as cellphones, backpacks and helmets. The robots scored points by sending the objects’ locations back to their human teammates. Finding all the objects meant exploring a trap-filled labyrinth with a half-mile of passages, featuring three made-from-scratch environments: urban, with a subway, storeroom and offices; a tunnel (a mock mine shaft); and a cave, a claustrophobic mash-up of spelunking’s greatest hits.
The competition was a major test of the proposition that someday teams of robots could help first responders assess disaster zones before risking human lives. It also marked an audacious step toward robot independence, since the robots would have to do their work mostly beyond human control. Eight teams, comprising more than 100 of the world’s top roboticists, followed the action remotely (and somewhat helplessly) from underground staging areas. They’d been lured not just by the $3.5 million prize purse — $2 million for first, $1 million for second, $500,000 for third — but also the potential for professional bragging rights.
All of this was a science fiction fantasy just three years ago. That’s when the Defense Advanced Research Projects Agency — DARPA, the Pentagon division dedicated to driving breakthrough technology — invited leading roboticists to compete. Months later, they gathered in a gold mine near Denver for an introduction to the SubT Challenge, as it’s known.
Until then, robots’ limited role in disaster zones or on bomb squads had typically required a human controller guiding a single robot with a joystick or a tether. And while robots are increasingly common in retail and manufacturing, they tend to perform preprogrammed routines or operate in pristine, structured environments. Rarely, if ever, had teams of robots been asked to collaborate autonomously and explore rugged, unknown terrain. There would be no GPS in the SubT Challenge, so the robots would have to make and share their own maps with one another. Plus, there would be spotty WiFi, so the robots would have to build their own communications networks. No single robot possessed all the capabilities required, so squads of different types of robots would have to be equipped with perception, mobility, decision-making and networking abilities that had never been deployed together in real-world scenarios.
“We had no technology for this three years ago when DARPA started this program,” says Steven Willits, a member of a team from Carnegie Mellon University. “Nobody in the world was able to do anything like this.”
The research problems DARPA tackles are so fundamental that they tend to have relevance far beyond warfighting. (Several years before the coronavirus pandemic, DARPA was already funding research into speeding up production of vaccines and antibodies, including work that led to the Moderna vaccine.) DARPA hit on the prize-competition model of sparking innovation in the early 2000s, with a series of self-driving-car grand challenges, which are credited with kick-starting that evolving sector of the auto industry. For the robot contest, DARPA’s timeline of three years had arguably forced technical solutions to emerge faster than they would have if left to private enterprise.
Preliminary competition circuits were held in a Pittsburgh coal mine in 2019 and in an unfinished nuclear power plant southwest of Seattle in 2020. Now, over four days in the 100-acre cavern in Louisville, stunning breakthroughs would emerge amid horrendous breakdowns. Egos would be bruised, hardware trashed, reputations made. In the end there was a tie for the $2 million top prize, and the tiebreaker rule would have to be invoked, establishing the winner by a matter of seconds. Along the way, as the robots found their bearings and beamed their findings back to their creators, they shed light on a question much larger than the competition: Just how far off is the day when humans will no longer be necessary at all?
Course designer Viktor Orekhov leads a tour of the cavern. (Jon Cherry/For The Washington Post)
— — —
The Louisville Mega Cavern, with its thick rock walls, dirt floor and roughly 30-foot ceilings, was once designated to house 50,000 people in case of nuclear war and now features zip lines and a holiday lights show. DARPA spent more than a month transforming it into a temporary underground civilization that was part research lab, part slickly produced robot faceoff.
The agency installed a television studio in one section, where sportscasters Camryn Irwin, who has covered events for ESPN, and Scott Walker, a Golf Channel veteran, anchored a daily live stream viewable via “DARPAtv” on YouTube. Irwin and Walker had done their homework, getting into the weeds of robot design and strategy with guest experts, while amping up the drama whenever possible over a soundtrack of heavy metal.
In another part of the cavern, DARPA had laid flooring for the team “garages,” fenced-off corrals on both sides of a broad, brightly lit limestone corridor. Here scores of sleep-deprived engineers turned the final screws on robot chassis and frantically tapped the last lines of code into laptops. (Separately, nine teams, including four from the live challenge, took part in a virtual-only competition.)
Over the summer, I’d called the teams to get to know them and their robots. Now, during the week of the competition, I wandered among the garages, meeting the roboticists and appreciating the variety of solutions they planned to throw at the challenge. I was struck by how the competitors labored practically side-by-side in workspaces open for all to see. By this point, they all more or less knew what the others had, like athletes who’d studied opponents’ highlight reels. In the finals it would come down to execution, and whose approach worked best against the surprises DARPA had in store on the course.
“Over the last three years, this community has sort of solidified,” said Matthew Travers, a systems scientist at Carnegie Mellon’s Robotics Institute, nodding at his rivals. “People are excited. This is the big thing we’ve been working toward. Obviously we want to win, but just being able to participate, to learn, to contribute, is good.”
Pressure was on Carnegie Mellon, a Pittsburgh-based robotics powerhouse. CMU was a favorite at SubT, having won the 2019 preliminary event — featuring a tunnel course — by a huge margin. Its team was called Explorer, in alliance with researchers from Oregon State University. Unlike most of the other teams, which had bought existing robots and souped them up with unique algorithms and unprecedented exploration abilities, the engineers from CMU had built their rugged, tractor-like robots and some of their collision-proof drones from scratch, while other durable drones came from a CMU spinoff company founded during the challenge. Their plan was to seed the labyrinth with communications nodes dropped from the tractors, allowing the robots to share information and to transmit the locations of scavenger hunt objects in order to score points. Drones would launch from the rear of the tractors to carry the search deeper and higher. “When it all works,” Travers said, “it’s actually quite sophisticated.”
Another favorite was CoSTAR, the team led by NASA’s Jet Propulsion Laboratory, in collaboration with marquee engineering players like Caltech, MIT and other partners. CoSTAR had won the 2020 urban circuit and planned to deploy four-legged robots, wheeled robots and drones. “To achieve the overall mission . . . you really need to push the boundaries of the state of the art,” Ali Agha, a roboticist at JPL, told me before the competition. Someday, he added, technology pioneered here could be used to explore beneath the surface of planets, which is where evidence of life — if it exists — is more likely to be found than on the exterior. “There’s no [perfect] solution out there today,” he said, “and there were even less solutions when we started three years ago.”
Like a handicapper playing the field at a racetrack, DARPA was already backing six of the eight teams, including CoSTAR and Explorer. Their approaches were promising enough to qualify for phased funding of $1.5 million from DARPA over three years, up to $4.5 million per team. The money gave those teams a decided advantage, but it was DARPA’s way of rewarding the best ideas and giving them the strongest chance of making it out of the lab and into the real world.
DARPA also backed an Australian lab’s team, called CSIRO Data61 — a collaboration of the Commonwealth Scientific and Industrial Research Organisation, a Brisbane-based company called Emesent and Georgia Tech — and a team called MARBLE, a project of researchers at the University of Colorado in Boulder and Denver, and other partners. In the two previous circuits, CSIRO and MARBLE had finished in the middle of the pack.
I shouldn’t have been surprised that there were two teams from the Czech Republic. After all, the word “robot” was coined by Czech playwright Karel Capek in his 1920 play “R.U.R.” (In the play, the robots are exploited, so they revolt. They kill most of the humans, until they realize they have killed the only beings who know how to make robots.) The team CTU-CRAS-NORLAB, a partnership of the Czech Technical University in Prague and Laval University in Quebec City, did so well in the early circuits that DARPA decided to fund it going into the finals. The other Czech team, which had American and Swiss partners, was called Robotika and was self-funded.
Near one end of the garages, a quartet of fire-engine-red quadrupeds crouched in repose. I couldn’t help thinking of the robot hounds in “Fahrenheit 451,” though these creatures were unarmed. They were called ANYmals, a leading rival of the yellow Spot walking robots. Every team in the SubT challenge that could afford to buy Spots (commercially available from Boston Dynamics for about $75,000 each) did so and customized them to explore autonomously — except one. Team CERBERUS built its strategy around ANYmals, made by ANYbotics in Zurich. CERBERUS, also funded by DARPA, was a partnership of the ETH Zurich research university, the Norwegian University of Science and Technology, and others including Berkeley, Oxford and the University of Nevada at Reno. In Greek mythology, Cerberus is the fearsome three-headed watchdog of the underworld. The team’s three heads, says Kostas Alexis, professor of robotics at the Norwegian university, are its legged robots, its flying robots and its autonomy algorithms.
Every competition needs plucky underdogs, and I found them at the other end of the garages: the self-funded Coordinated Robotics, led by independent roboticist Kevin Knoedler, along with a professor and undergraduates from California State University Channel Islands. Knoedler is so skilled at simulated robotics that the team won hundreds of thousands of dollars in the virtual track of the SubT competition; he used winnings from past contests to help fund Coordinated Robotics. He scrounged security robots on Craigslist, which the team rebuilt for the competition. Unable to afford fancy communications nodes to drop from the robots, the team repurposed Raspberry Pi computers — credit-card-size devices for beginners to learn programming — and devised a deployment mechanism that involved a paper clip, a twist tie and shotgun pellets.
The team won $250,000 in the urban circuit last year as the second-highest-scoring self-funded group. “We’re kind of a small, scrappy team, but that’s part of the fun of doing this,” says Jason Isaacs, associate professor of computer science at Channel Islands. “This is showing my undergrad students … how the big boys play in the top grad schools in robotics in the world. And you can do it, too.”

A CERBERUS robot navigates the cavern during the DARPA Subterranean Challenge. (Jon Cherry/For The Washington Post)
— — —
Strolling among the blinking and buzzing robots being worked on by the feverish humans was Timothy Chung, DARPA’s program manager for the challenge. He was the game master who had carefully designed what amounted to a huge lab experiment disguised as entertainment and sport. Before joining DARPA in 2016, Chung had been a drone specialist on the faculty of the Naval Postgraduate School. Under DARPA’s system of granting program managers only temporary tenure in order to avoid becoming stale, Chung had a few years to make technological splashes — and he intended the SubT Challenge to be one of his.
“Grand challenges are really great when you know that there’s innovation to be had, you know that there is a breakthrough waiting to happen, but it’s not abundantly clear which direction that breakthrough is going to happen,” Chung had told me in a Zoom call before we got to Louisville. “We’ll build the arena and the sandbox, and you get to come and propose your solutions.”
When we met inside the cavern, he pointed out the ways the competition was calibrated to yield practical results and theoretical breakthroughs. Chung had consulted with military commanders, the New York Fire Department and other first responders, as well as mine safety engineers and cave rescuers, to come up with the sorts of obstacles and booby traps that rescuers wish robots could investigate before human responders are put in danger.
While the Pentagon would surely benefit from any discoveries, there was an idealistic element of knowledge-for-all to the grand challenge. I wanted to know if it was worth the $82 million that DARPA had budgeted for the project, especially since the results would be open to the world, and teams from other countries were already benefiting.
“To really emphasize this desire to create a new community, maybe whole new industries, certainly breakthrough technologies, it really needs and warrants a big injection of resources,” Chung said. He also alluded to DARPA’s history — founded after the Russians launched the Sputnik satellite in the late 1950s to ensure America would not fall technologically behind again. “The other part of it is that DARPA’s interested in not only creating technological surprise, but preventing it as well,” he explained. “This is a great opportunity to learn what we do well and what we don’t always do well.”
The course designer, Viktor Orekhov, led the press corps on a tour of the labyrinth. I appreciated that he made us wear helmets, since I kept banging my head on synthetic stalactites as I stumbled through the cave section. “There’s a science to it, where it’s one big experiment,” Orekhov said of his booby-trapped creation. “There’s also kind of an art to it. … How do you design a course that’s difficult enough for ground robots and aerial robots, so that you can see what’s possible and really push where we want to see the technology go, without being so hard that nobody gets past the first 100 feet?”
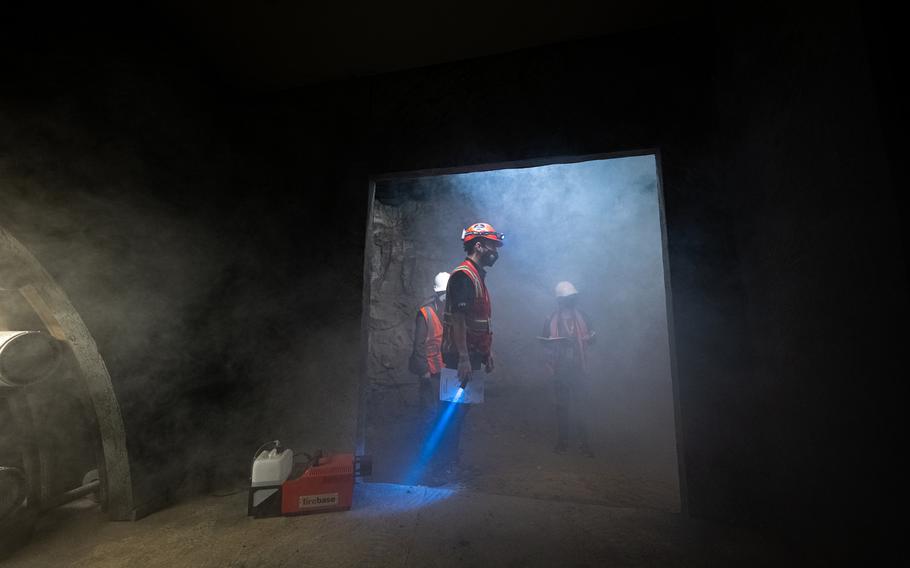
The course stretched a little more than a half-mile and consisted of the three interconnected underground worlds — urban, tunnel and cave — constructed within the larger underground of the Mega Cavern. For much of the tour we had to proceed doubled over; once we had to use our hands to scramble across a steep rise studded with artificial rocks. Some sections included features designed to challenge the robots’ agility, like a water hazard, mud, loose gravel, stalactites, three staircases and two sets of rails. There was at least one fog machine to confound robot sensors, and three places where heavy gates would swing down behind the robots so they would have to find a different way back.
Forty survivor mannequins and other artifacts, like cellphones, were scattered throughout. In addition to giving off heat, the survivors said, “Welcome to the SubT Challenge Final Event!” while the cellphones played DARPA videos and emitted wireless signals, all of which were detectable by robots equipped with cameras and sensors for heat, sound and signals. In the urban section, a mock office was flooded with carbon dioxide that could be picked up by a gas sensor.
The teams knew the types of artifacts but not the layout of the course or details of the obstacles, so they couldn’t over-prepare their robots. The whole thing was hard enough for humans to negotiate. How would robots do?

Team CERBERUS uses a robot to map the course during a practice run. (Jon Cherry/For The Washington Post)
— — —
The first two days of the competition consisted of short preliminary rounds to work out kinks in the robotics systems. DARPA changed details of the course every night so the teams never knew what to expect. Highlight reels of all the things that went wrong were the main entertainment on long nights of fixing the last bugs.
I heard laughter from the Australians’ garage and went over to see what was up. They were looking at a laptop, at footage of what happened on their second preliminary run, in the storeroom near the subway tracks in the urban section. A CSIRO drone took off from the back of a tank-style robot and quickly identified a backpack. So far so good. Then it aspirated a piece of plastic packing material into its propellers. The drone flipped and dropped like a stone. The roboticists laughed — it turned out the drone just needed a new prop. “Unfortunately, I never tried to teach the drone to dodge flying pieces of paper,” said Glenn Wagner, who had taught the drone just about everything else.
(The errant scrap of plastic wasn’t a trap set by Orekhov — it was authentic detritus left over from construction of the course. But since it had interfered with one team’s run, to be scrupulously fair, Orekhov carefully replaced it for future runs.)
Over in the CoSTAR garage, JPL’s Agha was a little more despondent over what had happened in the team’s first preliminary round. Three of the team’s robots — a drone, a walking Spot and a wheeled robot — met at an intersection. Maybe there was an algorithmic argument, but the walking robot stomped on the drone. Then the tractor drove over the drone, twice. The mishap, and other problems in the round, had led to what must be one of the greatest upsets in the history of robotics competitions: Mighty JPL-Caltech-MIT tied for last — a point behind Coordinated Robotics with its Craigslist hardware and paper clips.
But Agha and his teammates were beaming and fist-bumping after their second preliminary round. They scored better than every other team, the result of a strategy change and a software fix they hit upon around 5 a.m. that morning.
After the preliminary rounds, CSIRO was at the top of the leader board, followed closely by Explorer, CERBERUS, CoSTAR and MARBLE. The preliminary scores would have no bearing on the prize round on the third and last day of competition. Each team went into the finale with a clean slate and all the money on the table. They worked on final debugging with a mix of excitement and nerves, and tried to get some sleep.
“Three years — they all come down to 60 minutes,” CSIRO teammate Farid Kendoul, co-founder of Emesent, told me.
“DARPA’s going to throw everything they have at us,” said Willits of Explorer. “We’ve done all that we possibly could to prepare for this, and now we just have to go out and execute our plan to the best of our ability. … And the crazy thing is, the team who’s in last place [in the early rounds] could take home 2 million bucks.”
“The result will be good,” Alexis of CERBERUS predicted. “I don’t know if good means one or two or three. … Our goal is to be in the top three.”
The members of CoSTAR gathered in a circle and took turns reflecting on this final stage of an intense journey. “We’ll just go enjoy and see what the robots do,” Agha told his teammates. “It’s not us anymore.”
— — —
On game day, the teams packed up their robots to take their turn in the labyrinth, one by one. They climbed aboard trams that would carry the machines and the humans to the staging area at the entrance of the course. As each team passed down the corridor of garages, their competitors stood and clapped.
The staging area was a platform with room for a team’s robots and a small human pit crew. Only a few descending feet of dusty ground were visible through the entry arch. Above was a scoreboard to keep track of the time and the number of correctly identified objects. Each team had 60 minutes to find as many of the 40 survivors and artifacts as possible and report their location within five meters of accuracy. A point would be scored for each correct report, with 40 being a perfect score.
One teammate playing the role of “human supervisor” would sit at a table with computer monitors. On the supervisor’s command, the robots would walk, fly or roll through the arch and disappear. Gradually the map that the robots were making of the uncharted labyrinth would spread across the supervisor’s computer screen, like branches of a tree. The artifact reports came back from the robots as pictures or other data, and the supervisor’s job was to verify them and send them to DARPA for points. There was a penalty for too many wrong guesses.
Teams that had lagged in the preliminary rounds competed in the morning and didn’t find enough objects to be in contention: CTU, Coordinated Robotics and Robotika scored 7, 2 and 2 points, respectively.

Members of the Explorer team, from Carnegie Mellon University, working on one of their robots in the staging area during the competition. (Jon Cherry/For The Washington Post)
MARBLE, the team from Colorado, had arrived in Louisville planning to use the fewest robots — just two wheeled vehicles and two Spots — in one of the most purely autonomous ensembles. When things were going well during runs, Dan Riley, a doctoral student who was the human supervisor, sometimes felt he didn’t have enough to do. But at the last minute, the team made a fateful strategic decision to invest more control in the human. They added two short lines of computer code that made it possible, when the robots were within communication range, for Riley to receive an image of the view from the robot’s perspective. This helped Riley identify objects more quickly and, at one point, muscle a reluctant robot through fog. “Then I was able to let the autonomy take back over again, and it went off and found a bunch more artifacts,” he told me. The team scored 18 points.
CoSTAR’s robots ran into problems near the beginning. A Spot strode onto the course — and then halted and tried to return. The team realized the culprit: Orekhov’s fog machine was sending clouds billowing up toward the entrance, and some of the robots’ sensors were interpreting the fog as an impassable obstacle. The human supervisor adapted his strategy, but it was too late. The robots explored less than half the course and scored 13 points.
Sitting off to the side of the staging area, I watched the four red ANYmals of the Swiss-Norwegian alliance CERBERUS come to life. Spotlights on. Sensors spinning. The robots rose from a crouch and stepped to the entrance, toeing the starting line like sprinters. On command from Marco Tranzatto, the human supervisor, they stomped into action. Two of the ANYmals carried black communications nodes on their rears. Periodically they would stop, crouch and drop a node, expanding the communications network. The other two were equipped with extra sensors and roamed more widely. Every few minutes, the two roamers would return to within communications range and send back artifact reports. Tranzatto had the ability to tell the robots which general direction to go, but the robots would do the rest autonomously. The team’s drone failed to enter the course, and the ANYmals explored less than three-quarters of the labyrinth; still, they found plenty of artifacts in the areas they did reach. Final score: 23.
Explorer’s three heavy-duty wheeled robots practically raced down the urban, tunnel and cave passages, getting hung up in a few narrow places. The team’s drones swooped through the subway tunnel and explored the platform. One of the wheeled robots was the sole machine in the entire competition to scale a steep hill in the farthest reaches of the cavern. Then it slipped off a 15-foot cliff and lay immobilized on its back, wheels spinning. The crash occurred out of communications range, which meant another robot would have to retrieve its artifact reports to relay them back to the supervisor — but that wasn’t the biggest problem. Explorer’s energetic robot platoon sent so many hundreds of object reports back to the supervisor that he couldn’t scroll through them all before time ran out. At least six unscored points were left on the computer. In the end, the team lived up to its name and explored 93% of the labyrinth — more than any other team — but got just 17 points.
The last run of the day was by CSIRO, the Aussies. Before long, one of the two tank-tracked robots got stuck when the rails in the tunnel section peeled off one of its treads. The drone it carried couldn’t launch because the space was too confined. “So we lost two agents,” supervisor Brendan Tidd, a PhD student at Queensland University of Technology, told me later. Luckily, the team’s two Spots seemed to be exploring well autonomously. But time passed and one of the Spots failed to return to within communications range to upload its artifact reports. Tidd figured it must have fallen deep within the labyrinth. All he had left was the second tank to attempt to retrieve data from the Spot. The two shortest ways were blocked by the disabled tank and by one of Orekhov’s booby-trap gates that had closed a passage, so Tidd had to send the tank the long way around. “I’m flying down that cave path, comms nodes are flying on either side of the robot,” Tidd recalled. “I did that within the last five minutes. … It was a very stressful run.” Meanwhile, the other Spot autonomously retrieved data from the fallen Spot — but then fell over as well. It was still able to hand off the information to the tank. The maneuvers paid off. CSIRO created the most accurate map of the labyrinth by any team — and scored 23 points.
That night, it was clear MARBLE had won the $500,000 third prize. But CERBERUS and CSIRO were tied with 23 points each. Chung invoked the tiebreaker, clearly stated in the competition’s 36-page rule book: The team that identified its last artifact earliest would win. Since teams had only a hazy idea of the timing of their own points — and no idea about their rivals’ timing — Chung could keep the winner a secret until the next morning for a big made-for-DARPAtv reveal.
The roboticists assembled in a meeting hall DARPA had constructed in the cavern. Highlights of the prize round played on a giant screen but teasingly withheld the timing of key last artifact detections. Then Chung announced the results: Tidd’s mad dash for CSIRO had yielded a final point with under 30 seconds remaining; Tranzatto reported the last artifact for CERBERUS with just more than a minute left. The members of CERBERUS leaped from their folding chairs and congealed into a tight bouncing scrum like whooping athletes. They bounded to the stage to accept their oversize check for $2 million.
— — —
Speaking as a human, I found the results of the competition reassuring: The top three teams were the ones that had found ways to capitalize on cooperation between the intuitive genius of people and the relentless drive of robots. Teams that invested too much authority in the robots, or too little, came up short.
Chung, the game master, had foreseen this epiphany. By forcing the teams to surpass the known limits of robot autonomy over the past three years, he had led them back to an appreciation of the human role. “When you can get a handful of robots to do really meaningful, impactful things, and you can leave the human supervisor to go and do other meaningful, impactful things . . . that was really cool to see,” he said in a conversation with several of the competitors after the prizes were awarded. “That’s going to be the linchpin that offers up great new capabilities going forward.”
Of course, that word — “supervisor” — has such a different meaning from “operator.” An operator uses a joystick or a keyboard to command a machine to defuse a bomb or assemble widgets. A supervisor is too busy to focus on the motions of a single robot but instead oversees an ensemble. Perhaps, someday, we will look back and realize that September 2021 in the Louisville Mega Cavern was the moment our relationship with robots began to shift from operator to supervisor.
Several of the teams told me they had made discoveries over the past three years that are already being commercialized or opening up new frontiers for research. Still, the fact that the top scores were only 23 out of a possible 40 was a bit humbling to the roboticists, if not the robots. That meant nearly half the survivors or artifacts weren’t located. “It’s not clear that we will move humans out of that picture, ever,” Chung said earlier. “You will never have the ‘robot rescue squad’ because there’s still a lot that I think you would want humans in the loop for.”
The prize winners told me the money will be plowed back into research at their respective institutions. The morning after the awards ceremony, I returned to the cavern, where I found members of CERBERUS already back at work. Shehryar Khattak, who instilled the ANYmals with mapping abilities, was trailing one through the course while carrying an open laptop, making another map.
He freely acknowledged that CSIRO’s mapping solution had proved superior. And Explorer’s prowess at rapidly dispersing its robots through the labyrinth was “amazing.” “However,” he said, “this competition is not only about the technology, but the strategy. You have to balance all components. Your human supervisor is as important, or maybe more important, than the onboard localization system. It’s a harmony of systems, algorithms and people.”
Khattak told me about the next problem he’d like to tackle: robots navigating nature. Distinguishing between a bush and a rock is complicated. You can brush past one, while the other is hard and to be avoided. The dappled sunlight filtering through leafy glades in a breeze is utterly confusing to a robot.
I thought of all the times in my robot research when I had seen the machines paralyzed by sensory overload. Despite the best efforts of the world’s greatest roboticists, too much information — too many decisions, too much awareness — still causes drones to crash and mechanical quadrupeds to turn in endless baffled circles. I left the clammy cavern and filled my lungs with fresh air. It was time to go home, a journey of hundreds of miles that would require my brain to initiate countless precise motions and make experienced judgment calls to get through diverse and complicated environments. That night I would taste the tang of barbecue, and the next morning I would go for a run through a sun-dappled glade in the woods. I was suddenly intensely aware of, and grateful for, all the little superpowers that made me human.
Credit: Source link



















{kind=link}