
Margaret Coad was working toward her doctorate degree at Stanford in 2017 when inspiration struck a postdoctoral researcher in her lab — a brand new way for researchers to create deployable structures, navigate confined spaces and apply forces, such as lifting people up which could save someone’s life one day.
The inspiration: plants. The device: vine robots.
“He was thinking about the many ways to make robots lengthen and shorten and was looking at some plant and thought, ‘What if we could make a robot grow from its own tip?’” Coad said.
Coad, now assistant professor of mechanical and aerospace engineering at Notre Dame, designed the robots based on a plant’s ability to grow and shape itself based on its environment. As a result, the robots can explore spaces that are too small or dangerous for humans to enter.
The robots work by eversion, which is the process of turning the soft body of the robot inside out while it is lengthening. The soft body can be made of any airtight, unstretchable yet flexible material. This includes low density polyethylene, the material from which plastic bags are made. It is also the material of the “demo vine robot” Coad keeps in her purse for quick vine robot demonstrations.
The soft body of the demo vine robot is a cylindrical plastic bag sealed at the tip. Coad inflates the plastic by blowing into a plastic tube at the bag’s base. In the actual robots, this end is connected to a hard plastic body.
The tip of the tube is inside out toward the base. The eversion of the tube allows the tip of the tube to lead the rest of the body while it is lengthening. This is crucial, especially if there is a camera on the tip of the robot.
Coad and her team members were not the first people to play with robots that lengthen by eversion. Other research labs have written papers about this method in the past, Coad noted. Her team was, however, the first to come up with a mechanism that controls the robot’s movement.
In order to steer the robots, Coad and her team attached three tubes around the circumference of the robot body. These tubes shorten when inflated, so the shortening of these tubes causes the robot body to turn.
“It’s similar to how your finger works,” Coad said. “You’ve got your bone in the middle and your tendon going down the side. When you shorten your tendon, it curves your finger.”
Coad was able to put this steering mechanism to the test in both competition and at an archaeological site.
During the competition, she was able to maneuver the device through uneven terrain, a small aperture and past unstable obstacles.
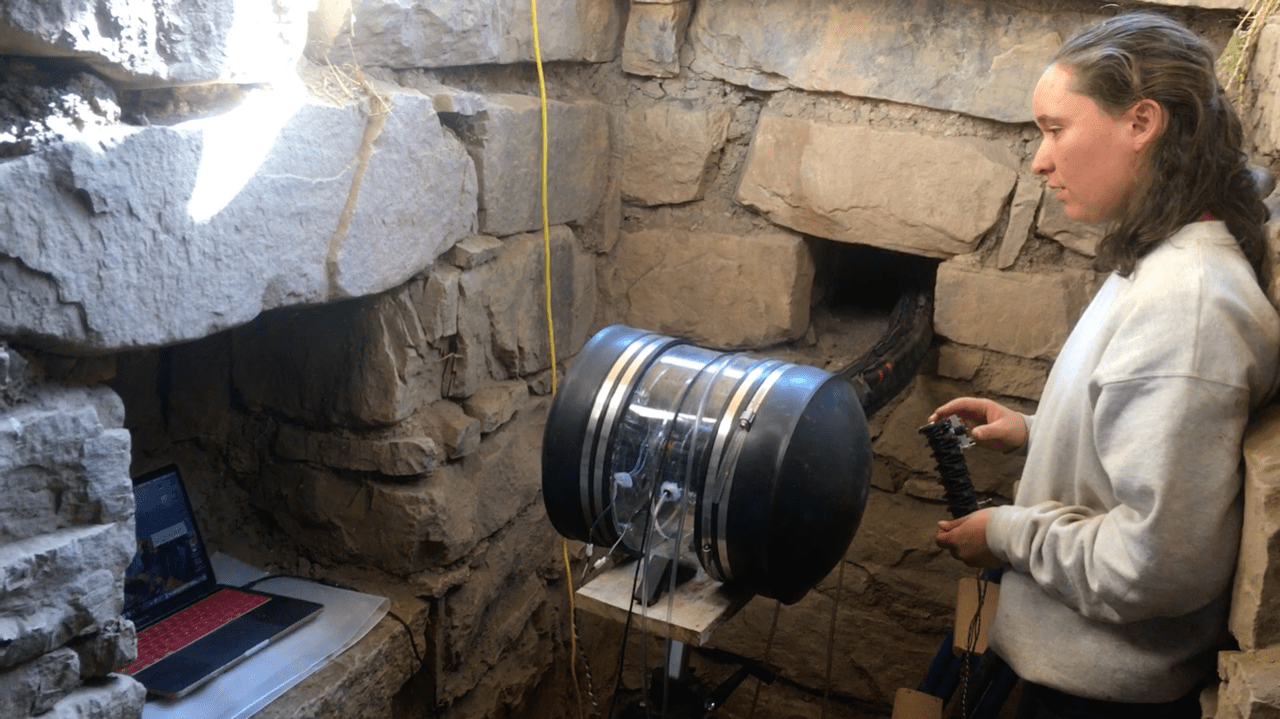
In 2019, Coad visited an archaeological site in Chavin, Peru, where her robot successfully navigated its way through a partially blocked tunnel, past a right angle and up a vertical shaft.
She documented her successes in a paper titled “Vine Robots: Design, Teleoperation, and Deployment for Navigation and Exploration.” Coad was the primary author of the paper that received the Institute of Electrical and Electronics Engineers (IEEE) Robotics and Automation Magazine Best Paper Award in May 2021.
Coad works in the Innovative Robotics and Interactive Systems (IRIS) Lab at Notre Dame. The goal of the lab, Coad said, is to design robots in new ways that can be more helpful in the real world. This includes robots that interact with people through wearable devices, such as soft exosuits that can help people move.
The researchers have also taken inspiration from nature beyond vines. Coad and her fellow researchers are also looking at spider monkey tails and their ability to grab objects as inspiration for robot design.
Nature has been an inspiration for Coad’s work, she said, but her biggest priority is helping people with her research.
“Our goal is to help people, and we’re going to try a bunch of different ways to do that,” Coad said. “One of the ways is looking to nature for inspiration and for new mechanisms of movement.”
The vine robot design and videos of both the robot in action at both the competition and archaeological site can be found on YouTube.
Credit: Source link


















{kind=link}