
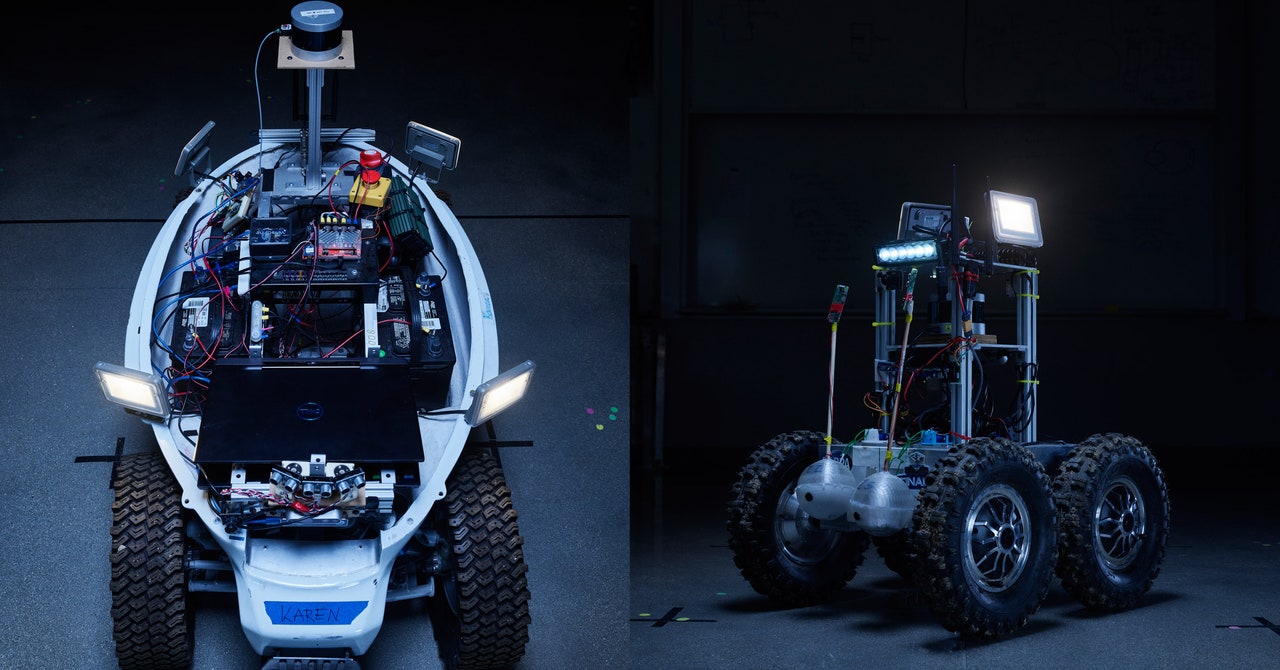
Cornelius, a hog-sized robot with fat rubber tank treads, has come to a stop in a small, verdant courtyard on the Spanish revival campus of California State University, Channel Islands.
“It’s either autonomous or broken,” Kevin Knoedler says, squinting into the summer sun, his face obscured by a mask and a hat with ear flaps. Knoedler, who has been building robots for decades, knows that it can be hard to tell the difference between a machine that’s kaput and one that’s cogitating.
“Autonomous,” says Andrew Herdering, a fourth-year mechatronics engineering major.
Suddenly, Cornelius sparks to life. The robot charges toward a backpack lying on the ground about 15 feet away. But then, halfway into its journey, it gets marooned on a large rock.
“Oh, no!” a third-year named Sara Centeno cries.
“It saw the backpack, and the way it’s programmed at the moment, it just mindlessly drives toward it,” Herdering says.
With some difficulty, I gather that Cornelius is in “detection mode,” which obligates it to seek backpacks, obstacles be damned.
What might look like the quotidian work of robotics undergrads anywhere is actually the fevered run-up, by a team known as Coordinated Robotics, to a huge event in the world of autonomy—the final round of the Subterranean Challenge, hosted by the US government’s Defense Advanced Research Projects Agency, or Darpa. In September 2021—a few weeks from now—Cornelius and the 20-odd other robots in the Coordinated fleet will be trucked off to Kentucky’s Louisville Mega Cavern to compete.
Darpa has held public challenges like SubT since 2004. They’re meant to draw talent from beyond the hermetic world of military R&D and jump-start innovation on very hard problems—forecasting the spread of an infectious disease, say, or launching a satellite on short notice. In the first Darpa challenge, a Humvee called Sandstorm autonomously drove 7.4 miles in the Mojave Desert before overshooting a turn and getting stuck. In the follow-up challenge a year later, five teams finished the full 132-mile course. Yesterday’s self-driving Humvee is tomorrow’s driverless taxi.
The SubT Challenge, which kicked off in 2018 and will conclude in the Mega Cavern, forces both robot and roboticist to confront the forbidding set of hurdles that exist underground—poor visibility, bad connectivity, hidden topography. It consists of both a physical competition and a virtual one. In the final physical contest, robots will snake through claustrophobic passages, clamber up stairs, and struggle through mud and fog—maybe even mock avalanches—as they search a course in the Mega Cavern for “thermal mannequins” (i.e., humans) and other “artifacts.” In the virtual competition, simulated robots will do all the same things inside a computerized rendering of the Mega Cavern course. At stake is $5 million in prize money.
The premise of the virtual competitions is that anyone with enough smarts and access to a computer—say, the quiet guy in dad jeans who tells fellow soccer parents, when they ask, that he “does robotics stuff”—can contribute meaningfully to the research. Knoedler (pronounced “nayd-ler”) excels at these contests. Darpa’s program manager for the SubT Challenge, Timothy Chung, calls him “a phenomenal software developer,” “very disciplined and methodical and practical.” But when the code has to interact with the real world, things get complicated. Knoedler quips that “you can solve 90 percent of the problem in the simulation and the other 90 percent on the robots.”
Credit: Source link



















{kind=link}